
As part of an exploration on hosting sites and services with a minimal hardware setup, I wanted to install WordPress on a Raspberry Pi. WordPress is an open-source software system for hosting sites and blogs. I’m trying it out because I thought it would be easy to install and setup and allow someone to manage posts without demanding they be familiar with HTML and other web technologies (though knowing them certainly helps). With the Raspberry Pi being an ARM based Linux computer, I also thought that these instructions might work on a NVIDIA Jetson with little alteration. When I tried it out, I found that these instructions work on the Jetson with no alteration needed at all. In this post I only show how to install WordPress and its dependencies. I’ll cover making the device visible to the Internet in a different post.
To get started, make sure that your Jetson or Raspberry Pi is up to date. Run the following two commands.
sudo apt-get update
sudo apt-get upgrade
These commands could take a while to run. Once they have finished, reboot your device.
Not to install the software. I’m connected to my device over SSH. You can run these commands directly through a terminal on the devicealso. But everything that I write is from the perspective of having access only to the terminal. We are going to install the Apache web server, a MySQL database, and a PHP interpreter.
Apache Web Server
To install the Apache Web Server, type the following command.
sudo apt-get install apache2
After running for a while, Apache should successfully install. You can verify that it is installed by opening a browser to your device’s IP address. From the terminal, you can do this with the following command.
lynx http://localhost
You should see the default Apache page display. To exit this browser press the ‘Q’ key on your keyboard and answer ‘y’ to the prompt.
Installing PHP
To install PHP on your device, use the following command.
sudo apt-get install php
With the PHP interpreter in place, we can add a page with some PHP code to see it processed.
Navigate to the folder that contains the Apache HTML content and add a new page named test-page.php
cd /var/www/html
sudo nano test-page.php
The file will have a single line as its content. Type the following.
<?php echo "Hey!"; ?>
You can now navigate to the page in a browser.
lynx http://localhost/test-page.php
Installing the Database
Maria Database is a mySQL database. It will contain the content for our site. Install it with the following command.
sudo apt-get install mariadb-server
The database is installed, but it needs to be configured. To access it, we need to setup a user account and a password. Decide what your user ID and password will be now. Also choose a name for the database. You will need to substitute my instances of USER_PLACEHOLDER, PASSWORD_PLACEHOLDER, and DATABASE_PLACEHOLDER with the names and passwords that you have chosen.
sudo mysql -uroot
You will be presented with the MariaDB prompt. Type the following commands to create your user account, database, and to give permission to the database.
CREATE USER 'USER_PLACEHOLDER'@'localhost' IDENTIFIED BY 'PASSWORD_PLACEHOLDER';
CREATE DATABASE DATABASE_PLACEHOLDER;
GRANT ALL ON DATABASE_PLACEHOLDER.* to 'USER_PLACEHOLDER'@'localhost';
quit;
We need to make sure that account can access the database. Let’s connect to the database using the account that you just created.
mysql -u USER_PLACEHOLDER -p
You will be prompted to enter the password that you choose earlier. After you are logged in, type the following to list the databases.
SHOW DATABASES;
A list of the databases will show, which should include a predefined system database and the one you just created.
We also need to install a package so that PHP and MySQL can interact with each other.
sudo apt-get install php-mysql
Installing WordPress
The downloadable version of WordPress can be found at wordpress.org/download. To download it directly from the device to the web folder use the following command.
sudo wget https://wordpress.org/latest.zip -O /var/www/html/wordpress.zip
Enter the folder and unzip the archive and grant permissions to Apache for the folder.
cd /var/www/html
sudo unzip wordpress.zip
sudo chmod 755 wordpress -R
sudo chown www-data wordpress -R
We are about to access our site. It can be accessed through the devices IP address at http://IP_ADDRESS_HERE/wordpress. As a personal preference, I would prefer for the site suffix to be something other than wordpress. I’m changing it to something more generic, “site”.
mv wordpress site
Now let’s restart Apache.
sudo service apache2 restart
From here on I am going to interact with the device from another computer with a desktop browser. I won’t need to do anything in the device terminal. Using a browser on another computer I navigate to my device’s IP address in the /site folder. The IP address of my device is 192.168.50.216. The complete URL that I use is http://192.168.50.216/site. When I navigate there, I get prompted to select a language.
The next page lets you know the information that you will need to complete the setup. That information includes
- The database name
- The database user name
- The database password
- The database host
- The Table name prefix
The first three items should be familiar. The fourth item, the database host, is the name of the machine that has the database. Since we are running the database and WordPress from the same device this entry will be “localhost”. If we were running more than one site from this device to keep the databases separate, the tables for each instance could have a common prefix. I’m going to use the prefix wp_ for all of the tables. All of this information will be saved to a file named wp-config.php. If you need to change anything later your settings can be modified from that file.
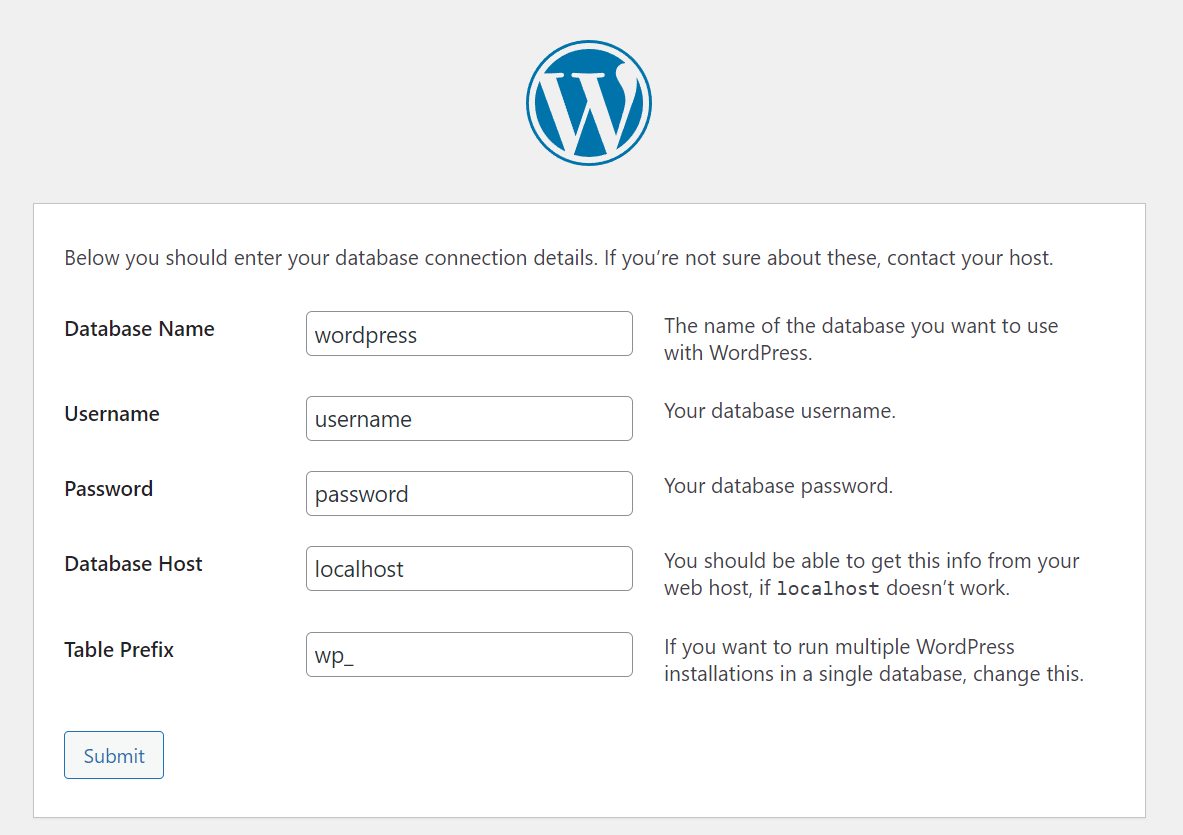
Enter your database name, user name, and password that you decided earlier. Leave the host name and the table prefix with their defaults and click on “submit.” If you entered everything correctly, on the next screen you will be prompted with a button to run the installation.

On the next page you must choose some final settings of your Word Press configuration.
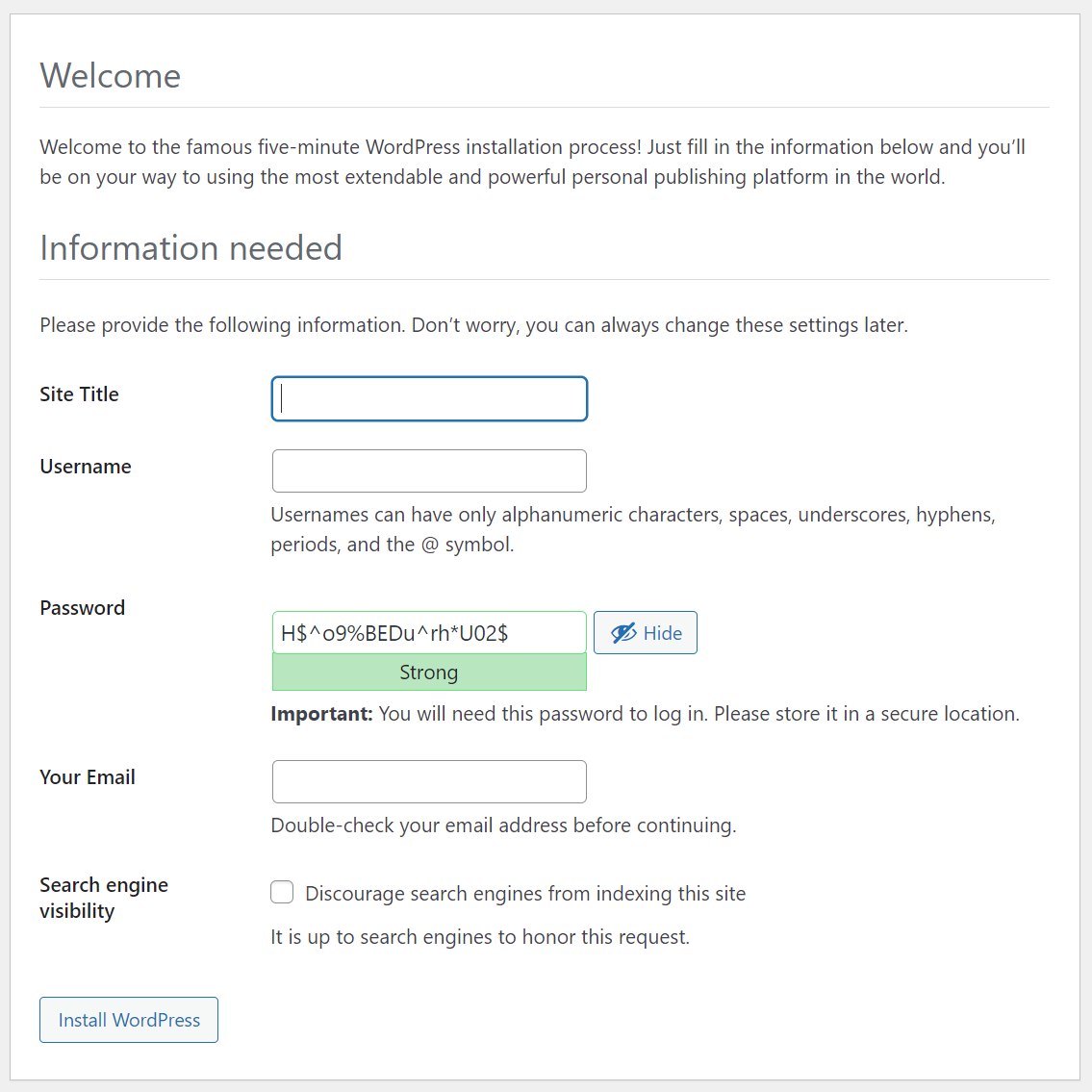
After clicking on “Install WordPress” on this screen, you’ve completed the setup. With the instructions as I’ve written them, the site will be in the path /wordpress. The administrative interface will be in the path /wordpress/wp-admin. WordPress is easy to use, but a complete explanation of how it works could be lengthy and won’t be covered here.







